无图智驾时代来临,谁能笑到最后?

简介:当今各大厂商都纷纷推出智能汽车,但真正考量一个车是不是智能的关键就是智能驾驶能力!随着华为宣布全国开启
【彩奇分享】
当今各大厂商都纷纷推出智能汽车,但真正考量一个车是不是智能的关键就是智能驾驶能力!随着华为宣布全国开启不依赖高精地图的城区高阶智驾,小鹏提出了243城都能开,一众友商也都是开足马力,比学赶帮超。智能驾驶似乎已经进入了一个全新的无图时代。
从之前的“开城”大赛,到现在的全国无图,到底是什么原因让各大车企选择跟进梭哈这个常人并不是太懂的无图领域呢?有图和无图的区别到底在哪?

有图依靠“钞”能力 无图依靠强大算力
有图和无图是完全两种不同的技术路线。有图智驾需要依托高精地图提供精确到厘米级的道路信息(如车道线的位置、类型、宽度、坡度和曲率,交通标志、红绿灯、障碍物等等),来帮助车辆进行路线的规划和智驾行为。说白了就是让车辆沿着地图中的那条精细无比的路径通行。但是这样的解题思路实在太烧钱了!
你知道吗?高精地图的测绘是一个非常复杂、繁重的工作,以至于每天每车只能测绘100公里左右,且每公里成本高达千元。而且在基建狂魔的“中国速度”之下,可能今天刚测绘过的道路,一周以后就变样了。同时,它也会严重制约车企智驾能力的体现,因为有图才可以,图变了,还得等新版地图了。
无图智能驾驶就不同。不再依赖高精地图,全国都能开也就顺理成章了。但是,脱离了高精地图就需要依靠更强的感知能力、更先进的算法和更强大的算力,这对车辆自身智驾系统的要求就更高了。


全国无图,华为是怎么又一次领先行业的
1.看得清 看得远 激光雷达依然是最佳方案
无图智驾目前主流的技术分为两大派别,激光雷达派和纯视觉派。目前最主流的高阶智驾依靠激光雷达,线程越多、扫描频率越高、探测越远的高性能激光雷达意味更加清晰的监测能力和更敏捷的反应速度。
所以那些非常网红的闪躲事件、拯救多个家庭的实战案例,直接证明了高性能激光雷达的硬实力。黑夜、逆光等环境更是这种强感知原件的优势所在,精细且大量的信息对算力和算法也有着更高的要求,所以搭载激光雷达的智驾车型不仅成本高,研发层面的软实力也不容忽视。
另一方面是以大疆和百度系为主的视觉系智驾方案,2D的视频内容相对来说对算力算法的要求没有那么苛刻,当然在诸多的实战环节,视觉系的智驾方案也没有带来多少高光时刻,说明二者在实际使用体验上还是存在一定差距的。更不用说摄像头容易受天气和强光的影响,这是客观实际。
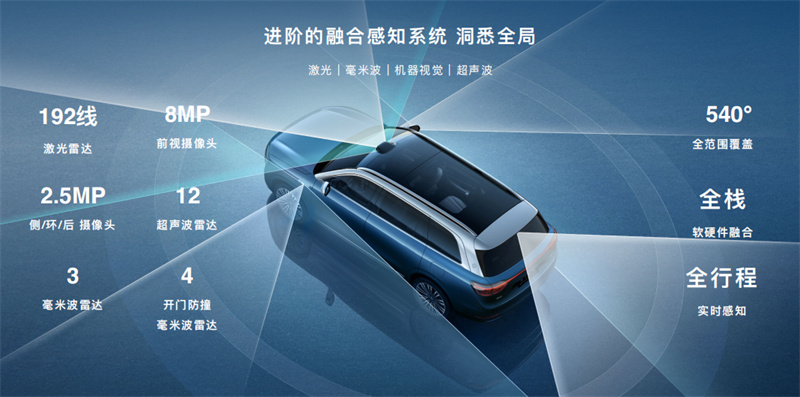
华为在系统硬件上就表现出了一种首屈一指的态度,采用了激光雷达、毫米波雷达、超声波雷达和视觉感知摄像头的多传感器融合感知方案。与纯摄像头最明显的区别是,激光雷达可以快速准确地获取周围环境的3D结构信息,且主动发光的特性也完全不受环境光线的影响。加上毫米波雷达、超声波雷达的探测和摄像头进行融合感知,为车辆提供了更远、更精确的3D环境信息。

而华为自研的融合感知系统将各种类型传感器深度融合调度,全栈自研也让各系统的沟通没有障碍,保证了各种传感器在数据上的顺畅沟通。
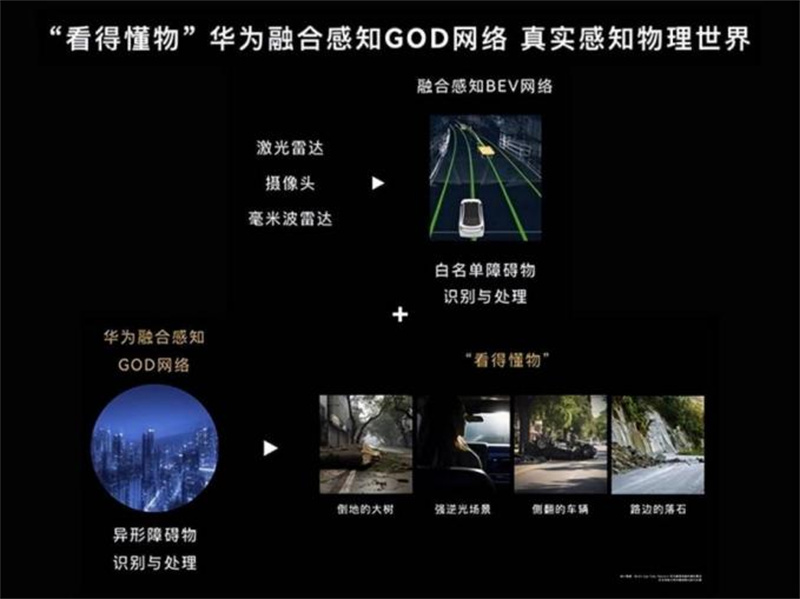
2.树枝也能躲得开 GOD网络不需要“白名单”
要实现对车辆的精准控制,智驾系统需要看得清楚和明白车外的环境——既要看得见,也要看得懂。以前比较常用的技术是BEV+白名单的方式,感知环境的同时利用提前输入到系统内的白名单,去判断探测到的物体是什么,如白名单里正常走路的行人、行驶的电瓶车等,识别后去判断是不是需要躲避。
这种技术的弊端也是比较明显的,需要不断让机器学习“障碍物类型”来丰富白名单,若碰到一些不在白名单里的物体(特别是不常见的异形障碍物),系统就会判断成一种不明情况,也是迟疑、犹豫、危险的智驾行为的问题根源。
声明:本文内容仅代表作者个人观点,与本站立场无关。如有内容侵犯您的合法权益,请及时与我们联系,我们将第一时间安排处理
-
-

-

-

-

-
 最值得买的20辆汽车 盘点性价比最高的车汽车百科100人阅读
最值得买的20辆汽车 盘点性价比最高的车汽车百科100人阅读 -

-
 为什么开特斯拉的都是女的?汽车百科100人阅读
为什么开特斯拉的都是女的?汽车百科100人阅读 -
 澳康达二手车为什么这么贵?汽车百科183人阅读
澳康达二手车为什么这么贵?汽车百科183人阅读 -

-

-

-

-